Readings Newsletter
Become a Readings Member to make your shopping experience even easier.
Sign in or sign up for free!
You’re not far away from qualifying for FREE standard shipping within Australia
You’ve qualified for FREE standard shipping within Australia
The cart is loading…


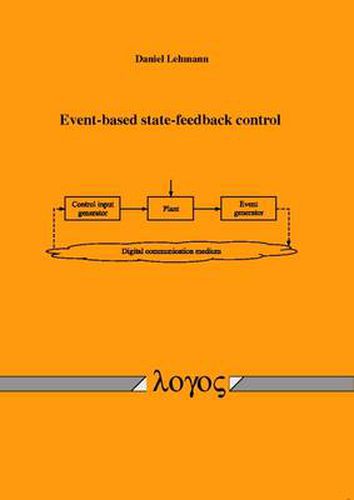
Event-based control is a means to reduce the information exchange over the feedback link in networked control systems in order to avoid an overload of the digital network which generally degrades the performance of the overall control loop. This thesis presents a novel state-feedback approach to event-based control which allows approximating a continuous-time state-feedback loop with arbitrary precision while adapting the communication over the feedback link to the effect of unknown disturbances. The focus of this thesis lies in complementing the event-based state-feedback control by deriving new properties, proposing alternative methods for the analysis and improving the components of the closed-loop system. Moreover, suitable strategies are proposed to deal with imprecise information about the plant and imperfect communication links. The theoretical results are evaluated by simulations and experiments using a thermofluid process.
$9.00 standard shipping within Australia
FREE standard shipping within Australia for orders over $100.00
Express & International shipping calculated at checkout
Stock availability can be subject to change without notice. We recommend calling the shop or contacting our online team to check availability of low stock items. Please see our Shopping Online page for more details.
Event-based control is a means to reduce the information exchange over the feedback link in networked control systems in order to avoid an overload of the digital network which generally degrades the performance of the overall control loop. This thesis presents a novel state-feedback approach to event-based control which allows approximating a continuous-time state-feedback loop with arbitrary precision while adapting the communication over the feedback link to the effect of unknown disturbances. The focus of this thesis lies in complementing the event-based state-feedback control by deriving new properties, proposing alternative methods for the analysis and improving the components of the closed-loop system. Moreover, suitable strategies are proposed to deal with imprecise information about the plant and imperfect communication links. The theoretical results are evaluated by simulations and experiments using a thermofluid process.
Search our extensive online catalogue.
